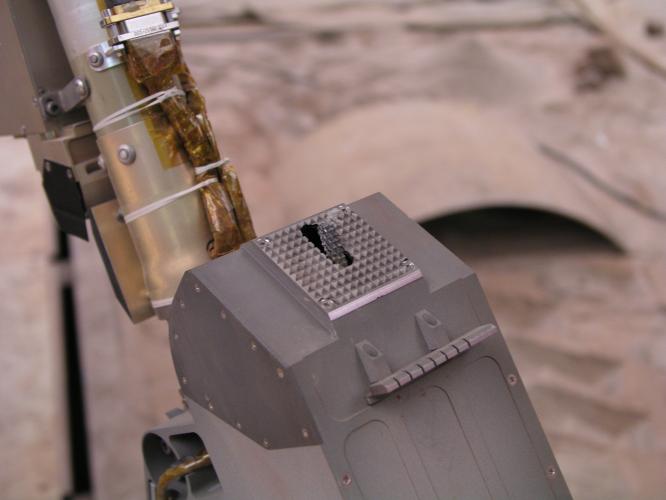
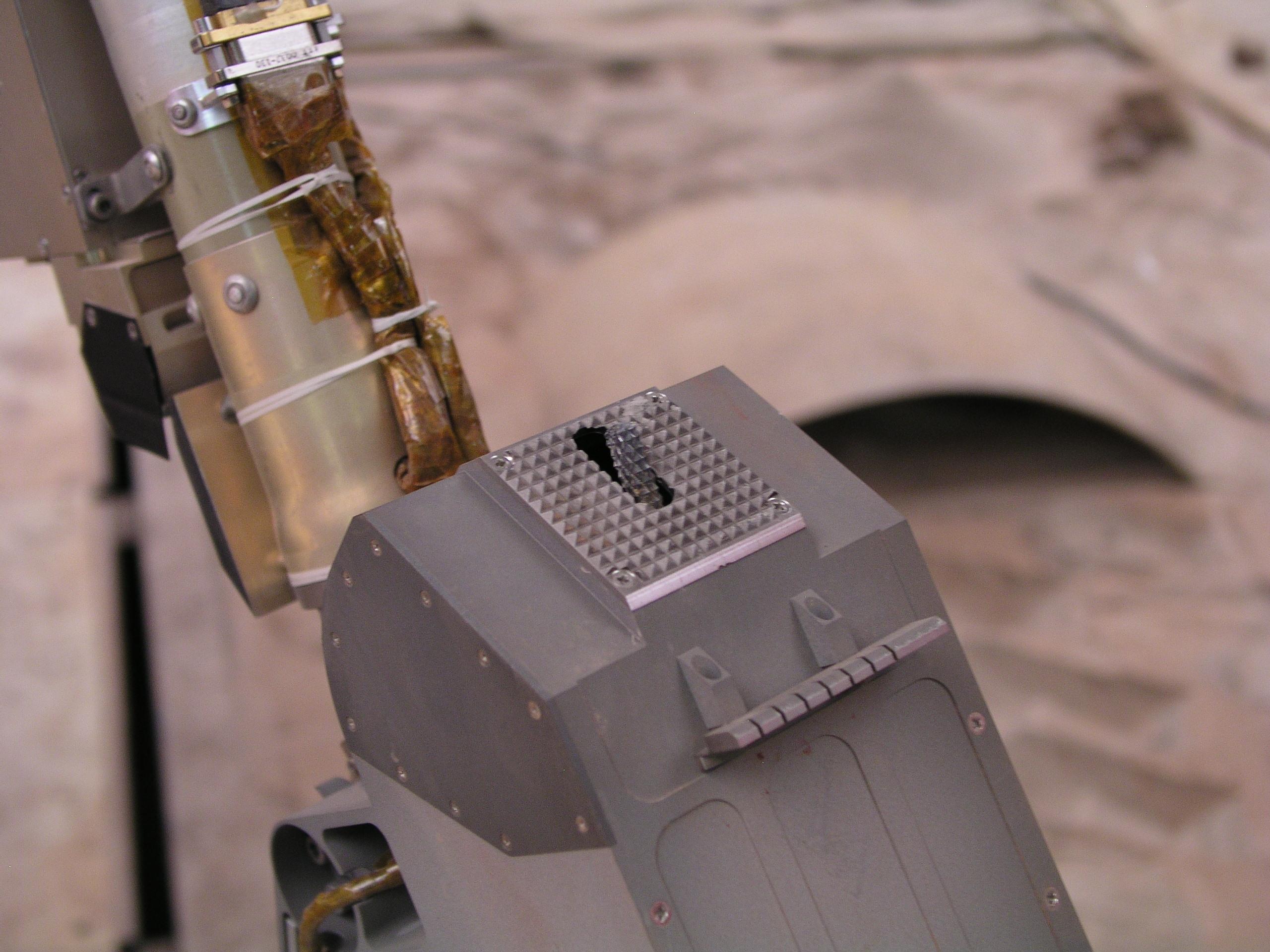
This close-up photograph taken at the Payload Interoperability Testbed at the University of Arizona, Tucson, shows the motorized rasp protruding from the bottom of the scoop on the engineering model of NASA's Phoenix Mars Lander's Robotic Arm.
The rasp will be placed against the hard Martian surface to cut into the hard material and acquire an icy soil sample for analysis by Phoenix's scientific instruments.
The Phoenix Mission is led by the University of Arizona, Tucson, on behalf of NASA. Project management of the mission is led by NASA's Jet Propulsion Laboratory, Pasadena, Calif. Spacecraft development is by Lockheed Martin Space Systems, Denver.
Photojournal Note: As planned, the Phoenix lander, which landed May 25, 2008 23:53 UTC, ended communications in November 2008, about six months after landing, when its solar panels ceased operating in the dark Martian winter.
{kind=link}