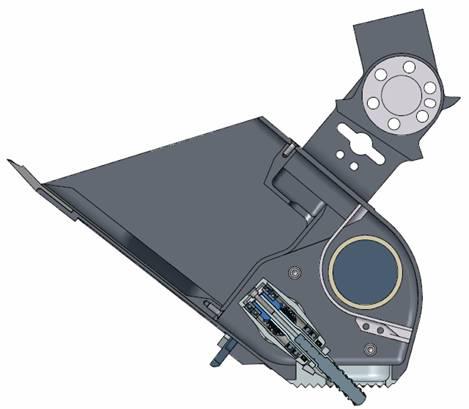
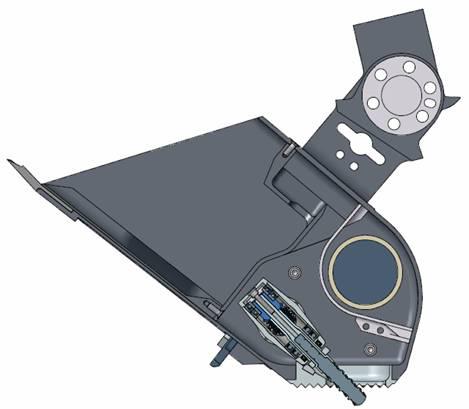
This drawing shows a side view of NASA's Phoenix Mars Lander's scoop with various tools for acquiring soil, icy soil and ice samples.
The front blade, at left, is for scraping. A secondary blade can scrape hard materials.
The motorized rasp, protruding at the bottom on the image, can penetrate the hard icy soil and acquire the cuttings produced through the rear chamber of the scoop. The rasp is a tungsten carbide cutting bit mounted within a pivoting housing that allows the bit to protrude during sample acquisition.
The Phoenix Mission is led by the University of Arizona, Tucson, on behalf of NASA. Project management of the mission is led by NASA's Jet Propulsion Laboratory, Pasadena, Calif. Spacecraft development is by Lockheed Martin Space Systems, Denver.
Photojournal Note: As planned, the Phoenix lander, which landed May 25, 2008 23:53 UTC, ended communications in November 2008, about six months after landing, when its solar panels ceased operating in the dark Martian winter.
{kind=link}