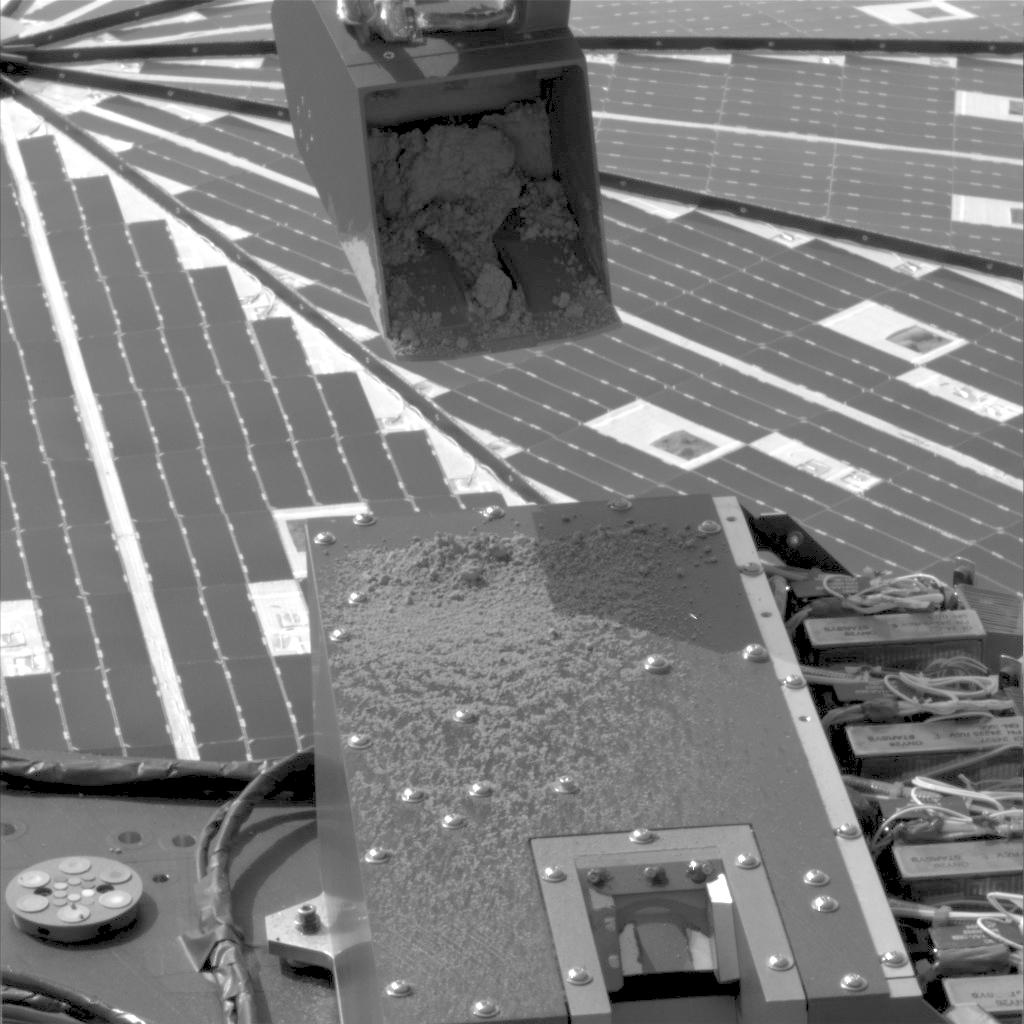
NASA's Phoenix Mars Lander used its Robotic Arm during the mission's 15th Martian day since landing (June 9, 2008) to test a "sprinkle" method for delivering small samples of soil to instruments on the lander deck.
This sequence of four images from the spacecraft's Surface Stereo Imager covers a period of 20 minutes from beginning to end of the activity.In the single delivery of a soil sample to a Phoenix instrument prior to this test, the arm brought the scooped up soil over the instrument's opened door and turned over the scoop to release the soil. The sprinkle technique, by contrast, holds the scoop at a steady angle and vibrates the scoop by running the motorized rasp located beneath the scoop. This gently jostles some material out of the scoop to the target below.
For this test, the target was near the upper end the cover of the Microscopy, Electrochemistry and Conductivity Analyzer instrument suite, or MECA. The cover is 20 centimeters (7.9 inches) across. The scoop is about 8.5 centimeters (3.3 inches) across.
Based on the test's success in delivering a small quantity and fine-size particles, the Phoenix team plans to use the sprinkle method for delivering samples to MECA and to the Thermal and Evolved-Gas Analyzer, or TEGA. The next planned delivery is to MECA's Optical Microscope, via the port in the MECA cover visible at the bottom of these images.
The Phoenix Mission is led by the University of Arizona, Tucson, on behalf of NASA. Project management of the mission is by NASA's Jet Propulsion Laboratory, Pasadena, Calif. Spacecraft development is by Lockheed Martin Space Systems, Denver.
Photojournal Note: As planned, the Phoenix lander, which landed May 25, 2008 23:53 UTC, ended communications in November 2008, about six months after landing, when its solar panels ceased operating in the dark Martian winter.
{kind=link}