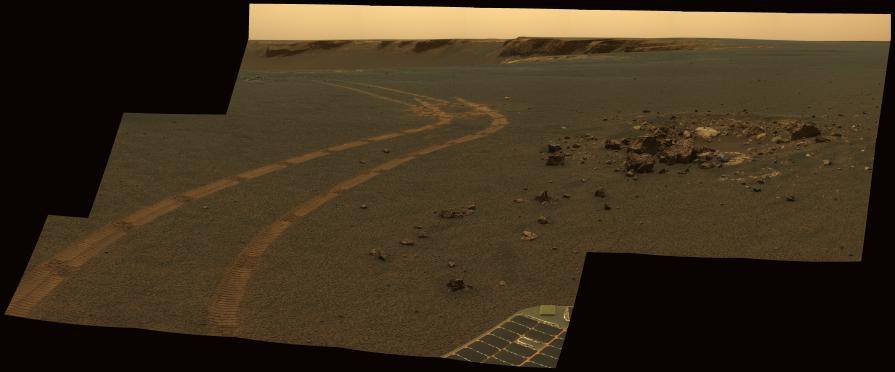
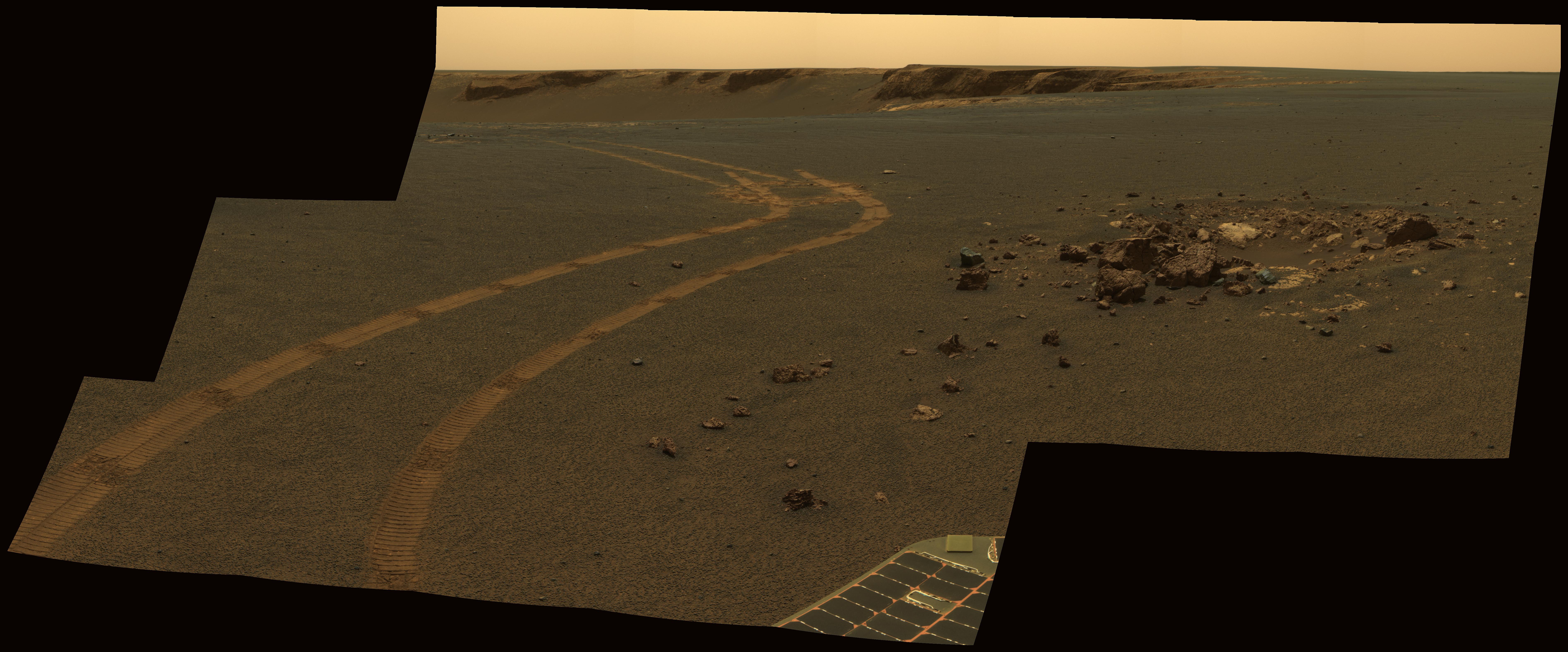
NASA's twin Mars Exploration Rovers have been getting smarter as they get older. This view from Opportunity shows the tracks left by a drive executed with more onboard autonomy than has been used on any other drive by a Mars rover.
Opportunity made the curving, 15.8-meter (52-foot) drive during its 1,160th Martian day, or sol (April 29, 2007). It was testing a navigational capability called "Field D-star," which enables the rover to plan optimal long-range drives around any obstacles in order to travel the most direct safe route to the drive's designated destination. Opportunity and its twin, Spirit, did not have this capability until the third year after their January 2004 landings on Mars. Earlier, they could recognize hazards when they approached them closely, then back away and try another angle, but could not always find a safe route away from hazards. Field D-Star and several other upgrades were part of new onboard software uploaded from Earth in 2006. The Sol 1,160 drive by Opportunity was a Martian field test of Field D-Star and also used several other features of autonomy, including visual odometry to track the rover's actual position after each segment of the drive, avoidance of designated keep-out zones, and combining information from two sets of stereo images to consider a wide swath of terrain in analyzing the route.
Two days later, on Sol 1,162, (May 1, 2007), Opportunity was still at the location it reached during that drive, and the rover's panoramic camera (Pancam) took the exposures combined into this image.
Victoria Crater is in the background, at the top of the image. The Sol 1,160 drive began at the place near the center of the image where tracks overlap each other. Tracks farther away were left by earlier drives nearer to the northern rim of the crater. For scale, the distance between the parallel tracks left by the rover's wheels is about 1 meter (39 inches) from the middle of one track to the middle of the other. The rocks in the center foreground are roughly 7 to 10 centimeters (3 to 4 inches) tall. The rover could actually drive over them easily, but for this test, settings in the onboard hazard-detection software were adjusted to make these smaller rocks be considered dangerous to the rover. The patch of larger rocks to the right was set as a keep-out zone. The location from which this image was taken is where the rover stopped driving to communicate with Earth. A straight line from the starting point to the destination would be 11 meters (36 feet). Opportunity plotted and followed a smoothly curved, efficient path around the rocks, always keeping the rover in safe areas.
This view combines separate images taken through the Pancam filters centered on wavelengths of 753 nanometers, 535 nanometers and 432 nanometers to produce an approximately true-color panorama.
{kind=link}