- Original Caption Released with Image:
-
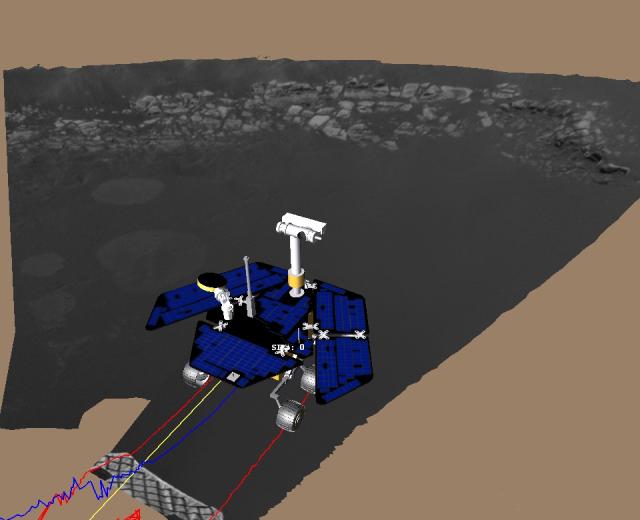
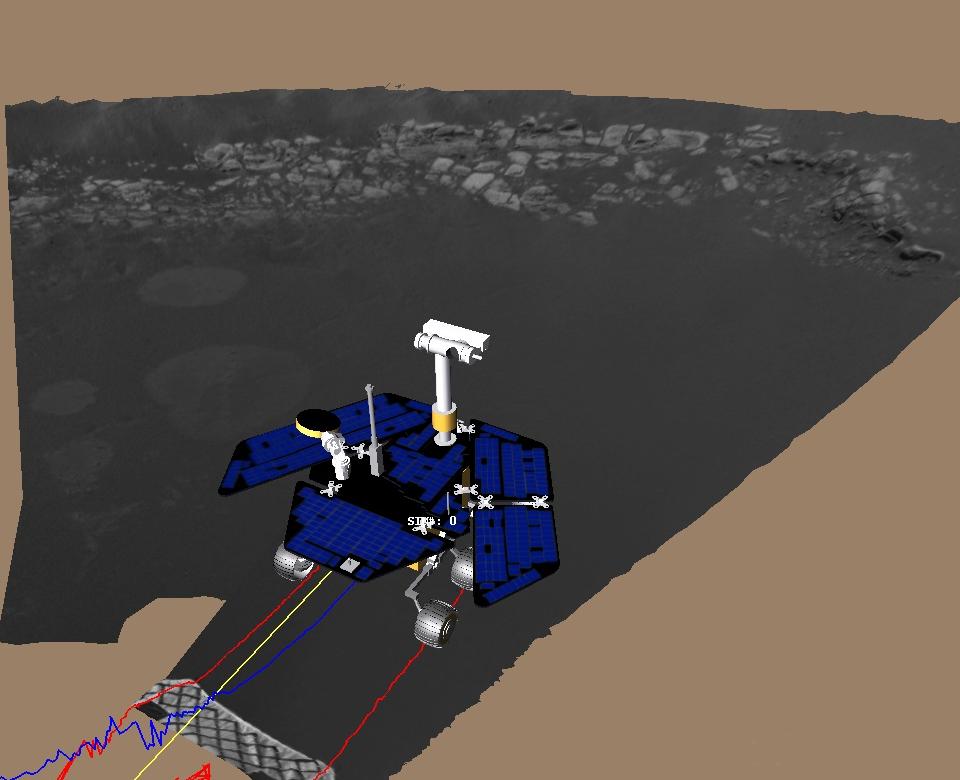
This image shows a screenshot from the software used by engineers to roll the Mars Exploration Rover Opportunity off its lander and onto martian soil. Engineers received confirmation that Opportunity's six wheels had touched ground at 3:01 a.m. PST, January 31, 2004, on the seventh martian day, or sol, of the mission. The software simulates the rover's movements, helping to plot a safe course. The virtual 3-D world around the rover is built from images taken by Opportunity's stereo navigation cameras. Regions for which the rover has not yet acquired 3-D data are represented in beige. The rover is approximately 1 meter (3 feet) in front of the lander, facing north.
- Image Credit:
-
NASA/JPL
Image Addition Date: -
2004-01-31
|
{kind=link}