In January 2006, NASA's Mars Exploration Rover team adopted a new strategy for carrying Opportunity's robotic arm (the instrument deployment device with its turret of four tools at the end) when the rover is driving.
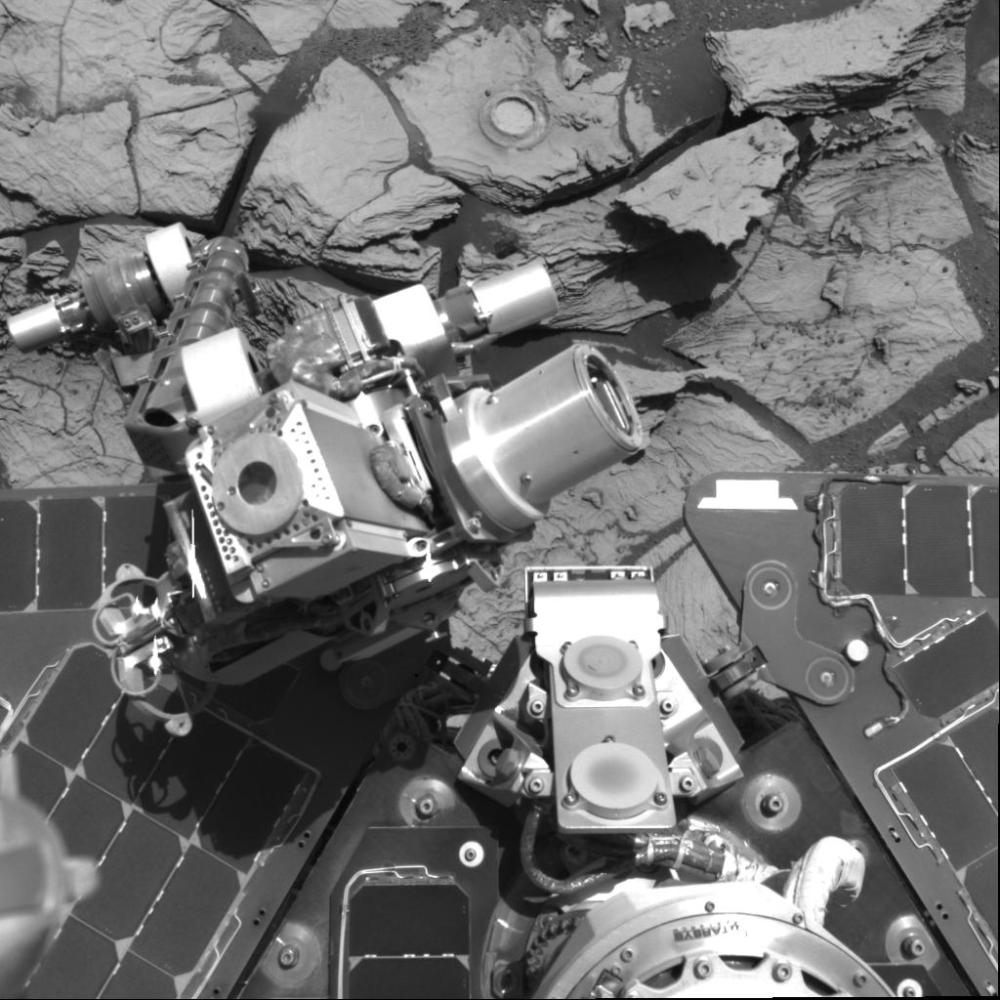
On short drives over smooth terrain, Opportunity now holds the arm in a "hover-stow" position as shown in this image taken by the navigation camera during the rover's 706th Martian day, or sol (Jan. 18, 2006), with elbow forward and the tool turret held above the rover deck. (In this image, the Moessbauer spectrometer is facing upwards, the alpha particle X-ray spectrometer faces to the right and the rock abrasion tool faces to the left). On longer or rougher drives, Opportunity still holds the arm in the original stow position used throughout the mission, tucked underneath the deck.
During Opportunity's 654th sol (Nov. 25, 2005), symptoms began appearing that have been diagnosed as a broken wire in the motor windings for the azimuth actuator at the shoulder joint, a motor that moves the arm from side to side. The motor still works when given extra current, but the change in strategy for stowing the arm results from concern that, if the motor were to completely fail with the arm in the original stow position, the arm could no longer be unstowed for use. If that motor were to fail while the arm is in the hover-stow position, the arm could still be manipulated for full use of the tools on the turret. However, the hover-stow position gives less protection to the arm during drives. Concern about protecting the arm during drives led to the compromise strategy of using hover-stow only during short, smooth drives.
{kind=link}