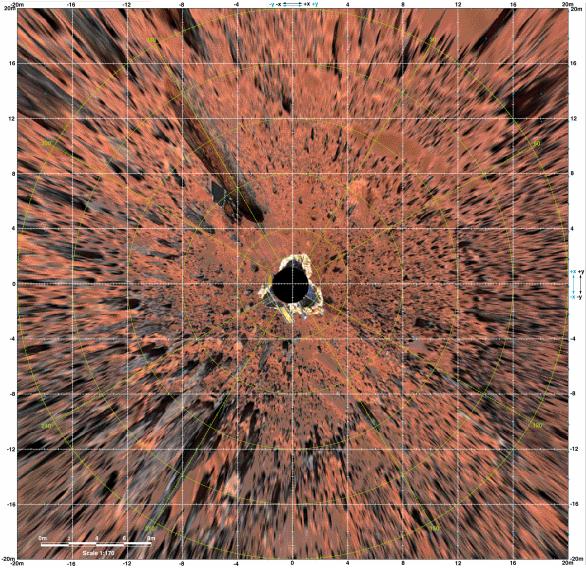
Planimetric (overhead view) map of the landing site, to a distance of 20 meters from the spacecraft. North is at the top in this and Plates 3-5. To produce this map, images were geometrically projected onto an assumed mean surface representing the ground. Features above the ground plane (primarily rocks) therefore appear displaced radially outward; the amount of distortion increases systematically with distance. The upper surfaces of the lander and rover also appear enlarged and displaced because of their height. Primary grid (white) is based on the Landing Site Cartographic (LSC) coordinate system, defined with X eastward, Y north, and Z up, and origin located at the mean ground surface immediately beneath the deployed position of the IMP camera gimbal center. Secondary ticks (cyan) are based on the Mars local level (LL) frame, which has X north, Y east, Z down, with origin in the center of the lander baseplate. Rover positions (including APXS measurements) are commonly reported in the LL frame. Yellow grid shows polar coordinates based on the LSC system. Cartographic image processing by U.S. Geological Survey.
NOTE: original caption as published in Science magazine
Mars Pathfinder is the second in NASA's Discovery program of low-cost spacecraft with highly focused science goals. The Jet Propulsion Laboratory, Pasadena, CA, developed and manages the Mars Pathfinder mission for NASA's Office of Space Science, Washington, D.C. JPL is a division of the California Institute of Technology (Caltech).
Photojournal note: Sojourner spent 83 days of a planned seven-day mission exploring the Martian terrain, acquiring images, and taking chemical, atmospheric and other measurements. The final data transmission received from Pathfinder was at 10:23 UTC on September 27, 1997. Although mission managers tried to restore full communications during the following five months, the successful mission was terminated on March 10, 1998.
{kind=link}