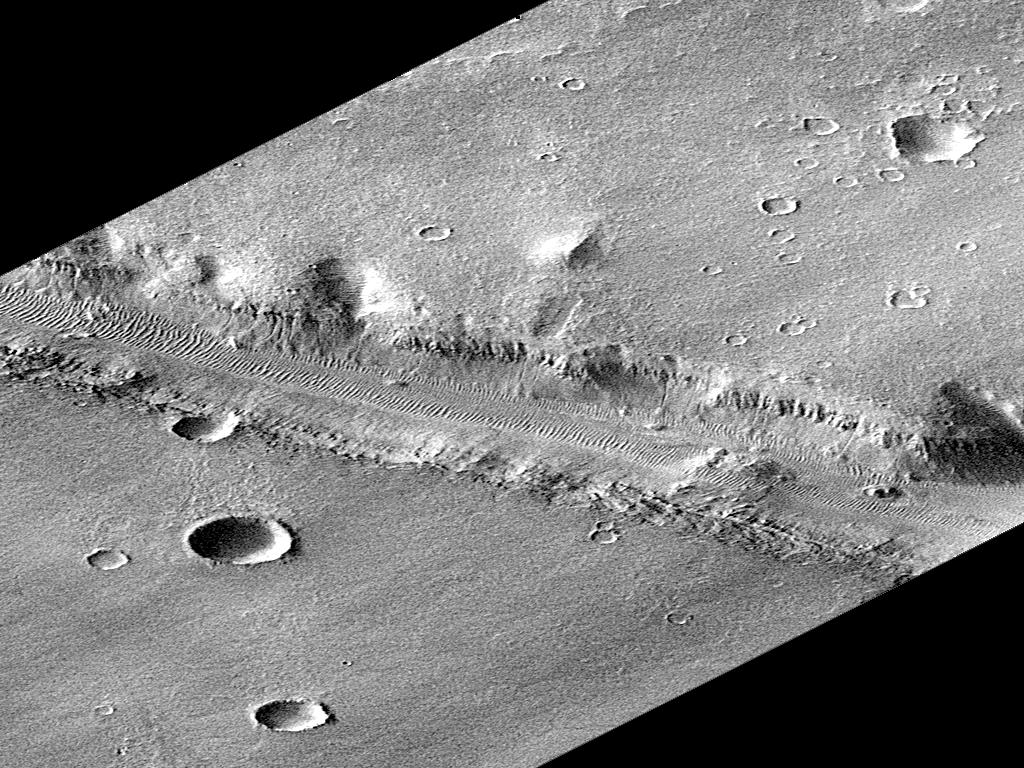
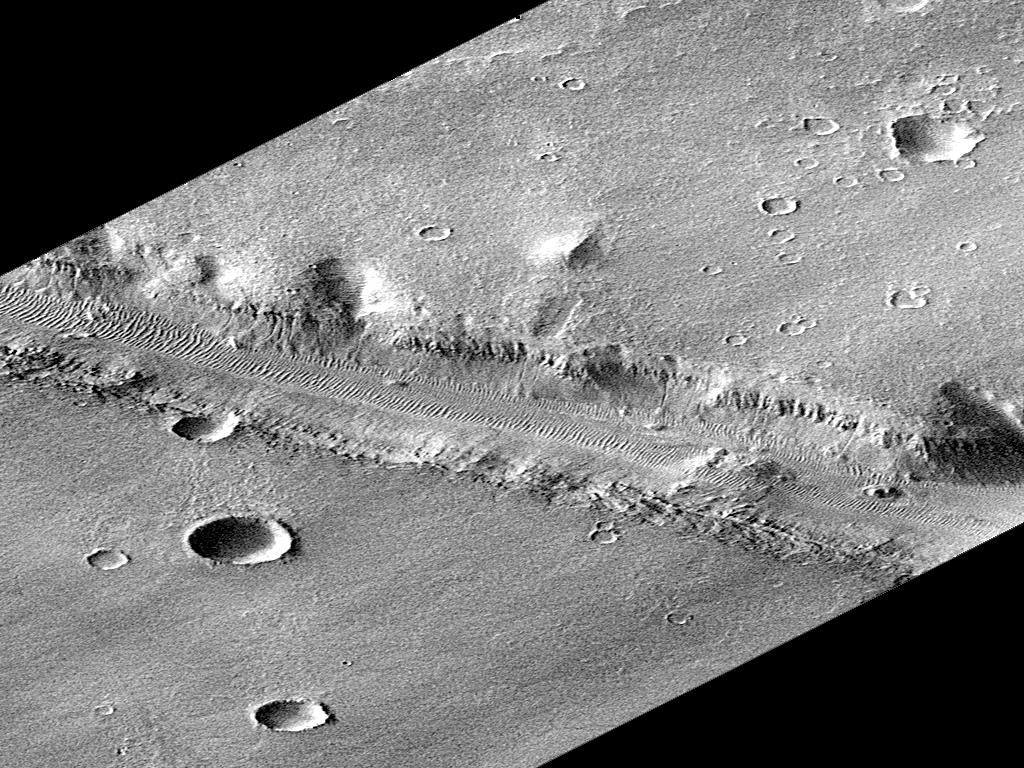
This is the full-resolution, rotated perspective image of Nirgal Vallis, a subset of PIA00942. Nirgal Vallis is one of a number of canyons called valley networks or runoff channels. Much of the debate concerning the origin of these valleys centers on whether they were formed by water flowing across the surface, or by collapse and upslope erosion associated with groundwater processes. At the resolution of this image, it is just barely possible to discern an interwoven pattern of lines on the highland surrounding the valley, but it is not possible to tell whether this is a pattern of surficial debris (sand or dust), as might be expected with the amount of crater burial seen, or a pattern of drainage channels. With 4X better resolution from its mapping orbit, MOC should easily be able to tell the difference between these two possibilities.
Launched on November 7, 1996, Mars Global Surveyor entered Mars orbit on Thursday, September 11, 1997. The spacecraft has been using atmospheric drag to reduce the size of its orbit for the past three weeks, and will achieve a circular orbit only 400 km (248 mi) above the surface early next year. Mapping operations begin in March 1998. At that time, MOC narrow angle images will be 5-10 times higher resolution than these pictures.
Malin Space Science Systems and the California Institute of Technology built the MOC using spare hardware from the Mars Observer mission. MSSS operates the camera from its facilities in San Diego, CA. The Jet Propulsion Laboratory's Mars Surveyor Operations Project operates the Mars Global Surveyor spacecraft with its industrial partner, Lockheed Martin Astronautics, from facilities in Pasadena, CA and Denver, CO.
{kind=link}