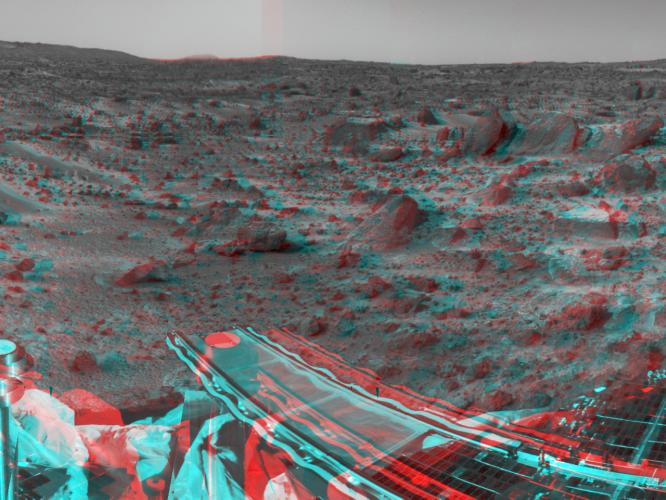
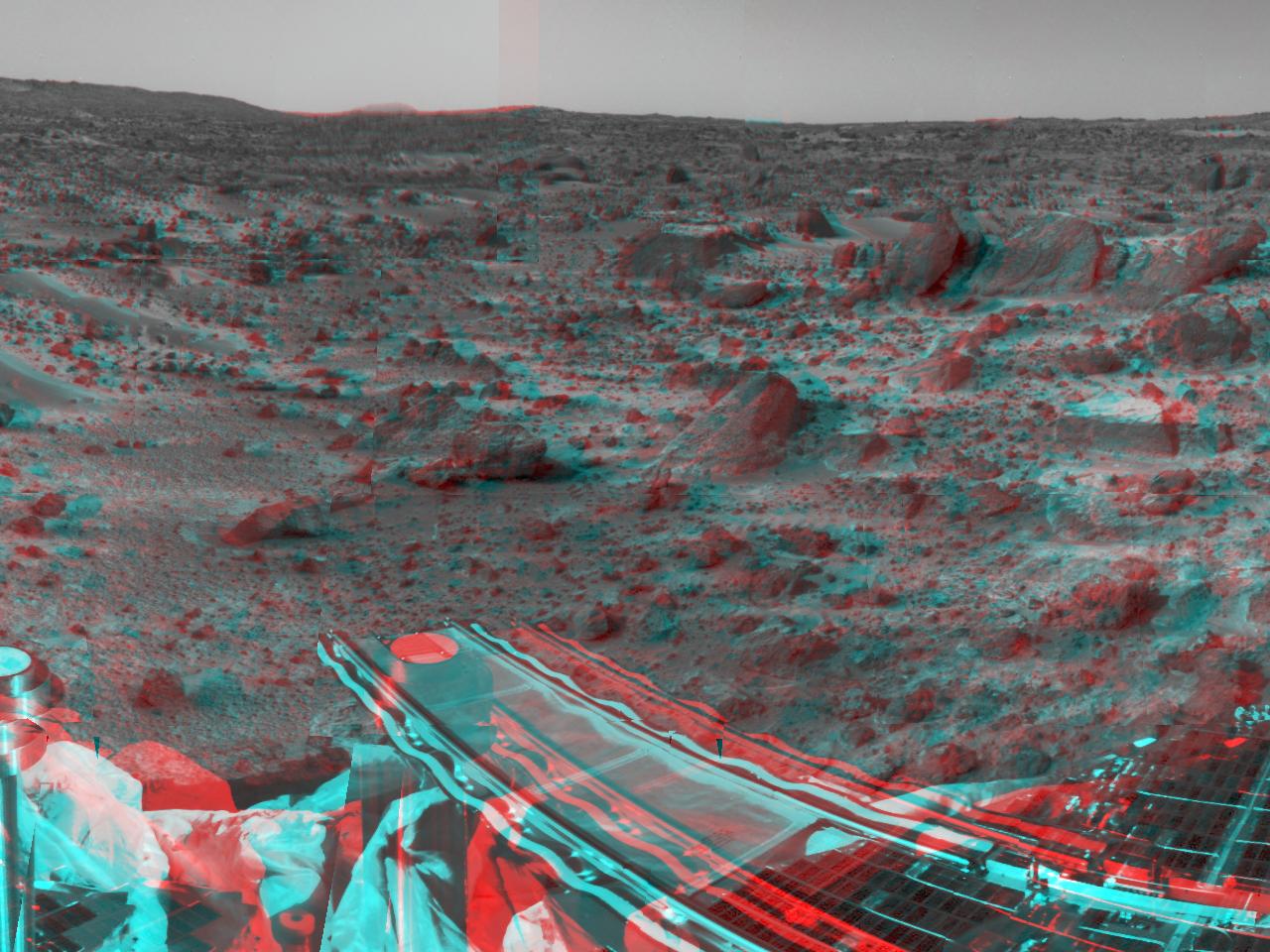
Mars Pathfinder's forward rover ramp can be seen successfully unfurled in this image, taken in stereo by the Imager for Mars Pathfinder (IMP) on Sol 3. 3D glasses are necessary to identify surface detail. This ramp was not used for the deployment of the microrover Sojourner, which occurred at the end of Sol 2. When this image was taken, Sojourner was still latched to one of the lander's petals, waiting for the command sequence that would execute its descent off of the lander's petal.
The image helped Pathfinder scientists determine whether to deploy the rover using the forward or backward ramps and the nature of the first rover traverse. The metallic object at the lower left of the image is the lander's low-gain antenna. The square at the end of the ramp is one of the spacecraft's magnetic targets. Dust that accumulates on the magnetic targets will later be examined by Sojourner's Alpha Proton X-Ray Spectrometer instrument for chemical analysis. At right, a lander petal is visible.
The IMP is a stereo imaging system with color capability provided by 24 selectable filters -- twelve filters per "eye." It stands 1.8 meters above the Martian surface, and has a resolution of two millimeters at a range of two meters.
Mars Pathfinder is the second in NASA's Discovery program of low-cost spacecraft with highly focused science goals. The Jet Propulsion Laboratory, Pasadena, CA, developed and manages the Mars Pathfinder mission for NASA's Office of Space Science, Washington, D.C. JPL is an operating division of the California Institute of Technology (Caltech). The Imager for Mars Pathfinder (IMP) was developed by the University of Arizona Lunar and Planetary Laboratory under contract to JPL. Peter Smith is the Principal Investigator.
Click below to see the left and right views individually.
Left | 
Right |
{kind=link}